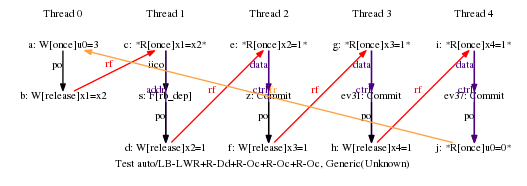
LISA auto/LB-LWR+R-Dd+R-Oc+R-Oc+R-Oc
(*
* Result: Sometimes
* P1-P2 rf R-Oc: Never->Maybe: Note lack of C11 guarantee, control dependency
* P2 Oc,R: Note lack of C11 guarantee
* P2-P3 rf R-Oc: Note lack of C11 guarantee, control dependency
* P3 Oc,R: Note lack of C11 guarantee
* P3-P4 rf R-Oc: Note lack of C11 guarantee, control dependency
* P4 Oc,LWR: Maybe->Sometimes: Control dependencies do not order trailing reads
*)
{
0:r3=x2; x1=y1; 2:r4=1; 3:r4=1; 4:r4=1;
}
P0 | P1 | P2 | P3 | P4 ;
w[once] u0 3 | r[deref] r1 x1 | r[once] r1 x2 | r[once] r1 x3 | r[once] r1 x4 ;
w[release] x1 r3 | w[release] r1 1 | mov r4 (neq r1 r4) | mov r4 (neq r1 r4) | mov r4 (neq r1 r4) ;
| | b[] r4 CTRL2 | b[] r4 CTRL3 | b[] r4 CTRL4 ;
| | w[release] x3 1 | w[release] x4 1 | r[once] r2 u0 ;
| | CTRL2: | CTRL3: | CTRL4: ;
Observed
4:r2=0; 4:r1=1; 3:r1=1; 2:r1=1; 1:r1=x2;