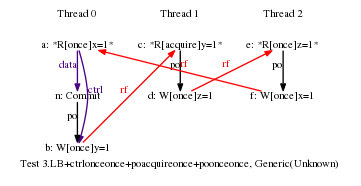
LISA 3.LB+ctrlonceonce+poacquireonce+poonceonce
"DpCtrldWOnceOnce RfeOnceAcquire PodRWAcquireOnce RfeOnceOnce PodRWOnceOnce RfeOnceOnce"
Cycle=PodRWAcquireOnce RfeOnceOnce PodRWOnceOnce RfeOnceOnce DpCtrldWOnceOnce RfeOnceAcquire
Relax=RfeOnceAcquire
Safe=PodRWAcquireOnce RfeOnceOnce PodRWOnceOnce DpCtrldWOnceOnce
Prefetch=0:x=F,0:y=W,1:y=F,1:z=W,2:z=F,2:x=W
Com=Rf Rf Rf
Orig=DpCtrldWOnceOnce RfeOnceAcquire PodRWAcquireOnce RfeOnceOnce PodRWOnceOnce RfeOnceOnce
{
}
P0 | P1 | P2 ;
r[once] r0 x | r[acquire] r0 y | r[once] r0 z ;
mov r1 (eq r0 0) | w[once] z 1 | w[once] x 1 ;
b[] r1 LC00 | | ;
LC00: | | ;
w[once] y 1 | | ;
Observed
2:r0=1; 1:r0=1; 0:r0=1;