


 …
… …
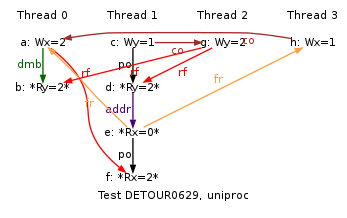
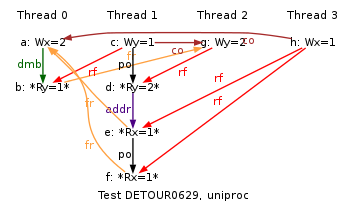
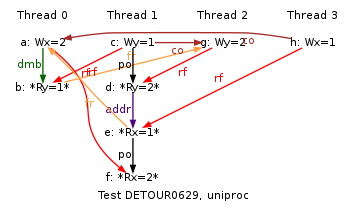
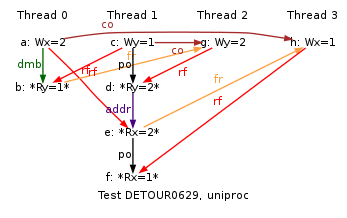
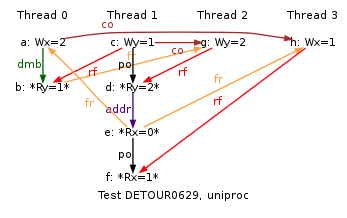
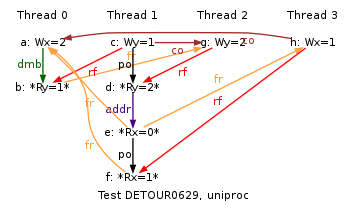
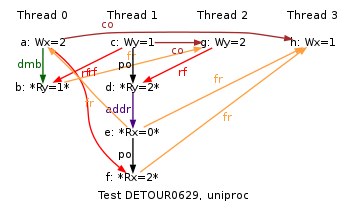
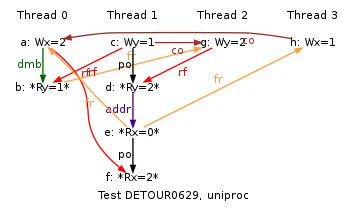
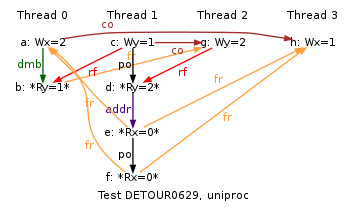
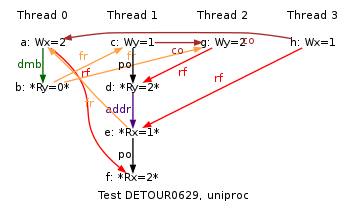
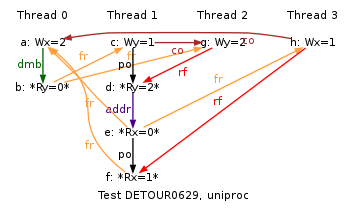
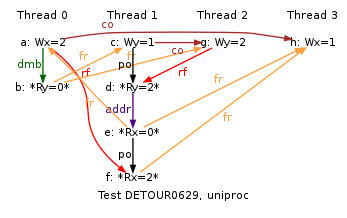
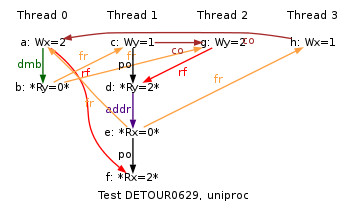
ARM DETOUR0629
"DMBdWR Fre DetourW DpAddrdR DetourR Fre"
Cycle=Fre DetourW DpAddrdR DetourR Fre DMBdWR
Prefetch=0:x=F,0:y=T,1:y=F,1:x=T
Com=Fr Fr
Orig=DMBdWR Fre DetourW DpAddrdR DetourR Fre
{
%x0=x; %y0=y;
%y1=y; %x1=x;
%y2=y;
%x3=x;
}
P0 | P1 | P2 | P3 ;
MOV R0,#2 | MOV R0,#1 | MOV R0,#2 | MOV R0,#1 ;
STR R0,[%x0] | STR R0,[%y1] | STR R0,[%y2] | STR R0,[%x3] ;
DMB | LDR R1,[%y1] | | ;
LDR R1,[%y0] | EOR R2,R1,R1 | | ;
| LDR R3,[R2,%x1] | | ;
| LDR R4,[%x1] | | ;
Observed
0:R1=0; 1:R1=2; 1:R3=0; 1:R4=0; x=1;
and 0:R1=1; 1:R1=2; 1:R3=0; 1:R4=0; x=1;
and 0:R1=0; 1:R1=2; 1:R3=0; 1:R4=1; x=1;
and 0:R1=1; 1:R1=2; 1:R3=0; 1:R4=1; x=1;
and 0:R1=1; 1:R1=2; 1:R3=2; 1:R4=1; x=1;
and 0:R1=0; 1:R1=2; 1:R3=0; 1:R4=2; x=1;
and 0:R1=1; 1:R1=2; 1:R3=0; 1:R4=2; x=1;
and 0:R1=0; 1:R1=2; 1:R3=0; 1:R4=0; x=2;
and 0:R1=1; 1:R1=2; 1:R3=0; 1:R4=0; x=2;
and 0:R1=0; 1:R1=2; 1:R3=0; 1:R4=1; x=2;
and 0:R1=1; 1:R1=2; 1:R3=0; 1:R4=1; x=2;
and 0:R1=0; 1:R1=2; 1:R3=1; 1:R4=1; x=2;
and 0:R1=1; 1:R1=2; 1:R3=1; 1:R4=1; x=2;
and 0:R1=0; 1:R1=2; 1:R3=0; 1:R4=2; x=2;
and 0:R1=1; 1:R1=2; 1:R3=0; 1:R4=2; x=2;
and 0:R1=2; 1:R1=2; 1:R3=0; 1:R4=2; x=2;
and 0:R1=0; 1:R1=2; 1:R3=1; 1:R4=2; x=2;
and 0:R1=1; 1:R1=2; 1:R3=1; 1:R4=2; x=2;